کنترل حرکت در رباتیک: 5 نوع موتور برای ربات های صنعتی
در قلب طراحی هر ربات، فیزیک حرکت است. اینکه حرکت چگونه انجام میشود، چگونه با دقت کنترل میشود، چقدر انرژی مصرف میکند و چگونه شرایط عملیاتی بهینه آن از طریق حسگرها اندازهگیری و حفظ میشود، نگرانیهای کلیدی برای هر مهندس رباتیک است. دستیابی به حرکت بستگی به نوع موتور مورد استفاده دارد. این کار در انواع مختلفی از عملکردهای رباتیک، از انتخاب و جابجایی گرفته تا استفاده از رنگ گرفته تا جابجایی مواد وجود دارد.
تیم های مهندسی که موتورها را ادغام می کنند امروزه از طرح های فشرده استفاده می کنند، اما این طرح ها عملکردهای بیشتری را نسبت به همیشه ترکیب می کنند. داده های داخلی و رابط های قدرت موتورها باید سریع، قابل اعتماد و کارآمد به هم متصل شوند.
در این مقاله، نگاهی به چهار نوع موتور اصلی مورد استفاده در رباتهای کارخانهای هوشمند امروزی میاندازیم.
موتورهای DC
موتورهای جریان مستقیم به طور معمول در کاربردهای باتری کار می کنند و در کاربردهای صنعتی رایج هستند. موتورهای DC به راحتی در اندازه های مختلف و نیازهای ولتاژ موجود هستند. موتورها در رباتیک مورد استفاده قرار می گیرند، که نیاز به سرعت و تحرک کمتری دارد. موتورهای DC به طور گسترده ای در کاربردهای صنعتی مورد استفاده قرار می گیرند زیرا می توانند با سرعت های نامحدود ، از سرعت کامل تا صفر ، با بارهای مختلف ، طیف وسیعی از سرعت را داشته باشند.
آنها همچنین دارای نسبت عزم چرخشی بالا به بی تحرک هستند و به سرعت به تغییر سیگنال کنترل پاسخ می دهند. بیشتر ربات های صنعتی با عزم چرخشی بالا و استفاده از موتورهای DC با سر و صدا کم. این موتورها واکنش سریع به شروع، توقف و شتاب دارند و قدرت راه اندازی بالایی دارند. موتورها به دلیل نصب و نگهداری ساده تر آنها ترجیح داده می شوند. موتورهای DC معمولاً در برنامه هایی مانند تجهیزات مرتب سازی انبار، ماشین های دوخت، آسانسورها، جاروبرقی ها و ماشین هایی که نیاز به قدرت ثابت دارند، استفاده می شوند.
موتورهای سرو
موتورهای سرو محرک های چرخشی یا خطی هستند که قطعات ماشین را با سطح بالایی از کنترل و دقت چرخان و هل می دهند. موتورهای سرو از یک موتور معمولی همراه با یک سنسور برای بازخورد موقعیت استفاده می کنند و بخشی از یک سیستم حلقه بسته با تعدادی از اجزای دیگر مانند شفت ، مدار کنترل ، دنده های محرک و موارد دیگر هستند.
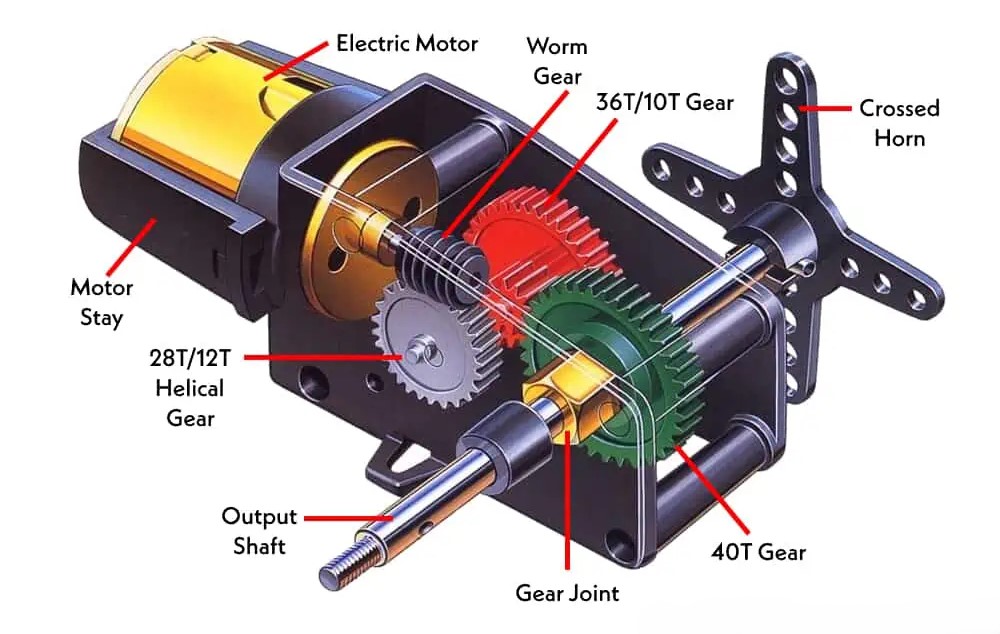
موتورهای سرو به دلیل کارایی بالا ، به ویژه در سیستم های حمل و نقل مواد و داخل ماشین آلات ، به طور فزاینده ای محبوب می شوند. با ادغام کنترل ها، موتورهای سرو به تدریج جایگزین سیستم های هیدرولیک و پنوماتیک می شوند.
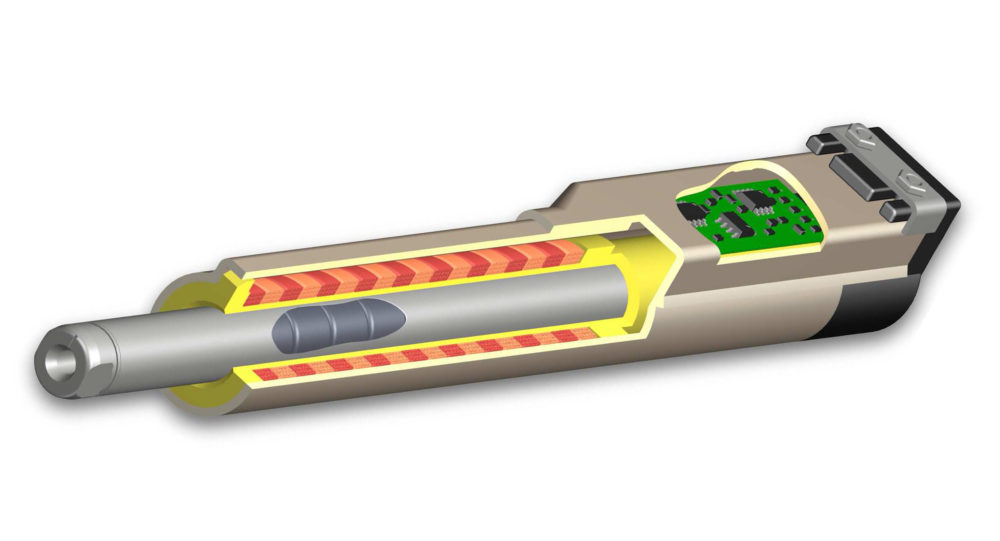
موتورهای خطی
موتورهای خطی موتورهای القایی الکتریکی هستند که به جای حرکت چرخشی، حرکت را در یک خط مستقیم ایجاد می کنند. در یک موتور خطی، استاتور (بخش استاتیک) بسته بندی نشده و مسطح است. به جای تولید گشتاور / چرخش ، یک نیروی خطی در طول طول خود تولید می کند.
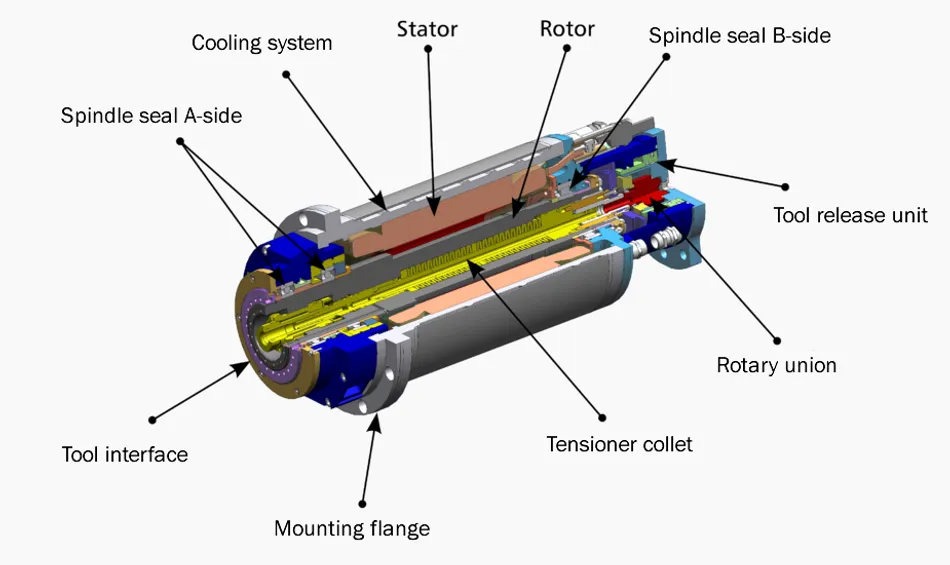
موتورهای اسپیندل
با توجه به پیشرفت در ماشین آلات، که نیاز به دقت بالا و قابلیت اطمینان دارند، موتورهای اسپیندل در حال تبدیل شدن به قلب سیستم های تولید مدرن هستند. موتور دنده ای یک موتور الکتریکی کوچک، با دقت بالا و قابلیت اطمینان بالا است که برای چرخش دنده (شفت) استفاده می شود. طراحی موتور معمولا یک موتور گام به گام با یک محور توخالی است که به طور خاص برای جذب نیروهای محوری طراحی شده است.
وقتی صحبت از ماشینکاری رباتیک می شود، پیچ ها باید انعطاف پذیر، با دوام باشند و محدودیت های بار مفید ریشه را برآورده کنند. پیچ های رباتیک در کاربردهای مختلف صنعتی مانند حفاری / سوراخ سازی ، آسیاب ، مسیریابی ، حکاکی ، پیساندن ، تخلیه ، پف کردن و موارد دیگر استفاده می شوند.
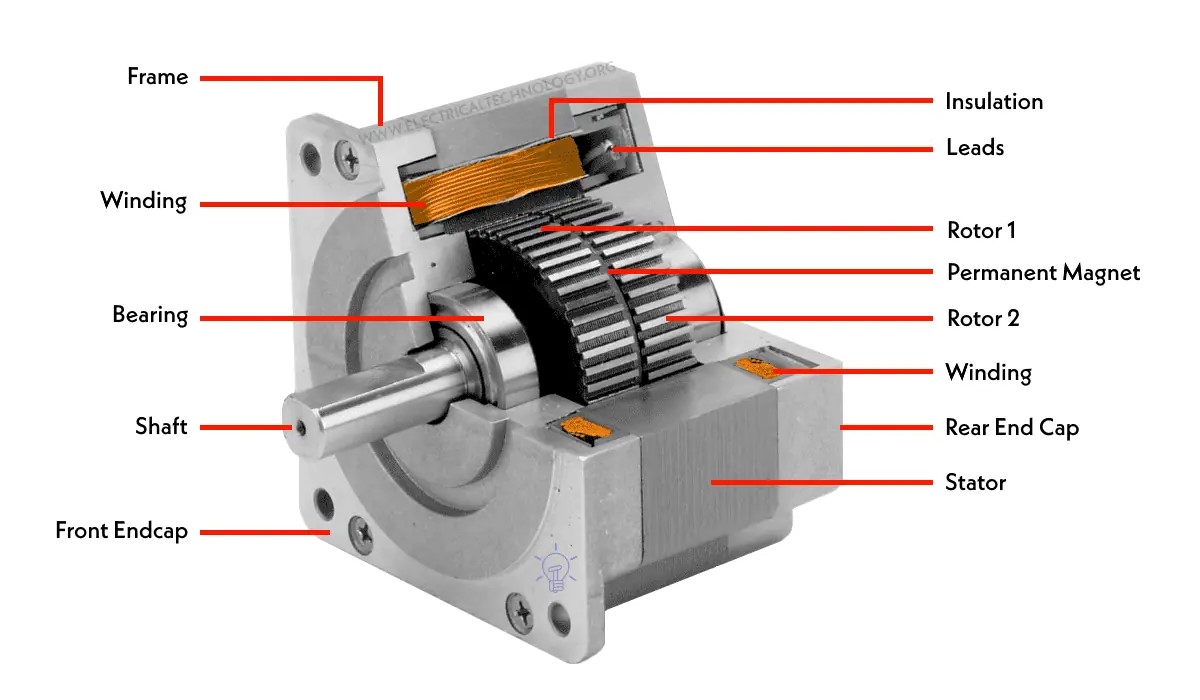
موتورهای استپر
موتورهای گامزن موتورهای DC هستند که یک چرخش کامل را به تعدادی از مراحل برابر تقسیم می کنند. يک پالس باعث ميشه موتور يک زاويه ي دقيق حرکت رو افزایش بده با فعال کردن هر مرحله به ترتیب، موتور می چرخد، یک قدم در یک زمان. افزایش جریان یا پالس باعث افزایش گشتاور موتور می شود، و هرچه فرکانس گام بالاتر باشد، سرعت موتور بالاتر است.