تکامل گیره های ربات
یکی از نوآوریهای برجستهای که در Automatica به نمایش گذاشته شد، پیشرفت در گیرههای ربات بود که استاندارد جدیدی برای فناوری جابجایی مواد ایجاد کرد. این گیرهها به لطف چندین پیشرفت تکنولوژیکی، هوشمندتر، سریعتر و حساستر شدهاند. اگرچه دستگیره های رباتیک اخیراً به خطوط تولید اضافه شده اند، نقش آنها به سرعت ضروری می شود.
گیره( گریپر ) چیست
گریپر وسیله ای است که به ربات اجازه می دهد یک شی را بگیرد، دستکاری کند و نگه دارد. گیرههای کوباتها میتوانند تولیدکنندگان را قادر سازند تا مراحل ضروری خط تولید، مانند مونتاژ، بازرسی، مراقبت از ماشین و همچنین انتخاب و مکان را خودکار کنند.
گیره ها در ساخت کار شبیه دست انسان هستند زیرا در انتهای بازو قرار دارند. این به کاربران اجازه می دهد تا قدرت یک بازوی دوقلو با مهارت یک دست را داشته باشند. از کوبات می توان برای کارهای سنگین، مانند چیدن جعبه ها، تا کارهای الکترونیکی ظریف استفاده کرد.
انواع مختلفی از گیرهها برای استفاده در کوباتها وجود دارد. این دسته از گیره های دست مانند انسان را شامل می شود. برخی حتی با پنج انگشت کامل می شوند. گاهی اوقات، یک گیره ممکن است فقط دو یا سه انگشت داشته باشد.
گیره ها همچنین می توانند به شکل پنجه یا با مکنده های بزرگ و کیسه های پر از هوا باشند که هر کدام با فرآیند متفاوتی طراحی شده اند.
گریپرهای فک موازی
گیره های فک موازی به عنوان یکی از رایج ترین و همه کاره ترین نوع گیره های مورد استفاده در رباتیک برجسته هستند. این دو فک متشکل از دو آرواره متضاد که قادر به حرکت موازی با یکدیگر هستند، دارای طراحی هستند که به طور مؤثری برای گرفتن اجسام با اشکال و اندازههای مختلف مناسب است. گیرههای فک موازی، چه بهکارگیری ظریف قطعات الکترونیکی کوچک و چه در دست گرفتن ایمن اقلام بزرگتر و با شکل نامنظم، در اجرای عملیات انتخاب و مکان دقیق عالی هستند. یکی از ویژگی های قابل توجه آن باید توانایی آن در اعمال کنترل دقیق بر نیروی چنگ زدن باشد، یک جنبه مهم در هنگام مدیریت اقلام شکننده یا موادی که نیاز به لمس ظریف دارند. این گیره ها که به دلیل سرعت و قابلیت اطمینان خود شناخته شده اند، در کاربردهایی مانند بسته بندی، تولید و خطوط مونتاژ ضروری شده اند.

آنها را می توان با فک های نرم یا سازگار برای جابجایی اشیاء ظریف بدون آسیب رساندن مجهز کرد، در حالی که فک های محکم تر هنگام گرفتن اجسام سنگین پایداری می کنند.
گیره های فک موازی اغلب دارای طیف وسیعی از طرح ها و مواد فک هستند که متناسب با کاربردهای مختلف طراحی شده اند.
گیره های خلاء
این گیرهها که به عنوان گیرههای مکش نیز شناخته میشوند، به ویژه در جابجایی اقلام مسطح و صاف مانند شیشه، پلاستیک و ورقهای فلزی مؤثر هستند. یک گیره خلاء شامل یک پمپ خلاء است که مکش را از طریق شبکه ای از کانال ها یا سوراخ ها در پد دستگیره ایجاد می کند. در عمل، گیره با استفاده از نیروی مکش خود را به سطح جسم میچسبد و به ربات اجازه میدهد آن را بلند کرده و دستکاری کند.
این گیره ها معمولاً در صنایعی که نیاز به موقعیت یابی دقیق و حداقل تماس با جسم دارند مانند صنایع غذایی (برای بسته بندی)، چاپ و تولید لوازم الکترونیکی استفاده می شود.
سازگاری گیره های جاروبرقی به آنها اجازه می دهد تا شکل ها و اندازه های مختلف پد را در خود جای دهند و در عین حال آنها را قادر می سازد تا طیف گسترده ای از اشیاء را کنترل کنند.
برخی از گیره های خلاء به سنسورهایی نیز مجهز هستند تا امنیت دستگیره خود را تأیید کنند و قابلیت اطمینان آنها را هنگام برخورد با اقلام ظریف افزایش دهند.
گیره های انگشتی
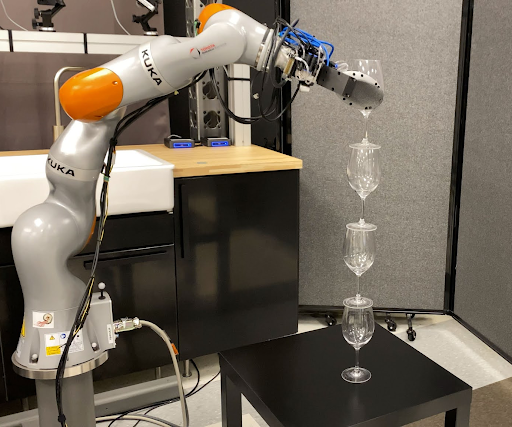
وقتی صحبت از دستکاری اجسام با اشکال نامنظم یا هندسه های پیچیده می شود، گیره های انگشتی راه حل عالی را ارائه می دهند. این گیره ها مجهز به چندین انگشت یا اعداد هستند که می توانند در حین گرفتن با شکل جسم مطابقت داشته باشند. این انگشتان را می توان از مواد سفت و سخت برای پایداری یا مواد نرم و سازگار برای محافظت از اقلام ظریف، بسته به کاربرد خاص، ساخت. گیره های انگشتی بسیار متنوع هستند و در طیف وسیعی از صنایع کاربرد دارند.
آنها معمولاً در کارهایی مانند جمع کردن سطل زباله استفاده می شوند، جایی که یک ربات باید اشیاء را از یک سطل پر از آیتم های مخلوط انتخاب کند.
انطباق پذیری و انعطاف پذیری گیره های انگشتی آنها را برای انواع کارهای اتوماسیونی که نیاز به مهارت بالایی دارند ایده آل می کند.
گیرههای انگشتی را میتوان به حسگرهای لمسی یا سیستمهای بازخورد نیرو مجهز کرد و به آنها اجازه میدهد تا چسبندگی خود را بر اساس ویژگیهای جسم تنظیم کنند. این قابلیت ربات ها را قادر می سازد تا با اشیاء با اشکال و اندازه های مختلف با دقت برخورد کنند.

گیره های پنوماتیک
گیره های پنوماتیک از هوای فشرده برای کنترل حرکت فک خود استفاده می کنند. آنها به دلیل سرعت و توانایی خود در ارائه یک چسبندگی قوی شناخته شده اند، که آنها را به گزینه ای ارجح برای کاربردهای با سرعت بالا در خطوط مونتاژ تبدیل می کند. این گیره ها اغلب در صنایعی مانند خودروسازی و مونتاژ الکترونیک یافت می شوند.
سیستم پنوماتیک در این گیره ها امکان حرکت سریع فک را فراهم می کند و آنها را برای کارهایی که نیاز به اقدامات سریع و دقیق دارند مناسب می کند. علاوه بر این، گیرههای پنوماتیکی به دلیل استحکام و دوام خود شناخته شدهاند و برای محیطهای صنعتی تکراری و سختگیر مناسب هستند.
گیره های پنوماتیکی در پیکربندی های مختلفی از جمله گیره های دو انگشتی، سه انگشتی و زاویه ای وجود دارند که به آنها اجازه می دهد تا با نیازهای مختلف گرفتن سازگار شوند.
برخی از گیره های پنوماتیکی به گونه ای طراحی شده اند که لمس نرمی را ارائه دهند، که هنگام کار با مواد یا اجزای حساس ضروری است.
گیره های الکترومغناطیسی
گیره های الکترومغناطیسی از میدان های مغناطیسی برای نگهداری و دستکاری اجسام آهنی (مغناطیسی) مانند اجزای فلزی استفاده می کنند. این گیره ها در مواقعی که نیاز به گرفتن محکم و پایدار بر روی اجسام فلزی باشد بسیار کارآمد هستند. گیره های الکترومغناطیسی معمولاً در ساخت فلز، فرآیندهای بازیافت و کاربردهای مختلف جابجایی مواد به کار می روند. گیره های الکترومغناطیسی مزیت قابل توجهی را در قابلیت تغییر میدان مغناطیسی ارائه می دهند که آزاد شدن بدون زحمت جسم نگه داشته شده را تسهیل می کند.
این ویژگی به طور قابل توجهی تطبیق پذیری و سازگاری آنها را افزایش می دهد و آنها را به عنوان یک ابزار حیاتی در صنایعی که مواد آهنی نقش برجسته ای ایفا می کنند، معرفی می کند.
گیره های الکترومغناطیسی مجهز به سیستم های کنترلی پیشرفته هستند که به تنظیم دقیق نیروی مغناطیسی کمک می کنند. این درجه بالای کنترل، توانایی گیره را برای گرفتن اشیا، صرف نظر از تغییرات اندازه یا وزن آنها، تضمین می کند.

گیره های هیدرولیک
این گیره ها وزنه های سنگین دنیای گریپر هستند. آنها از مایع هیدرولیک برای عملکرد دقیق فک های خود استفاده می کنند، به ویژه در کارهایی که مستلزم جابجایی اجسام بزرگ و سنگین است که نیاز به نیروی چنگ زدن قابل توجهی دارند، عالی هستند. صنایعی مانند ساخت و ساز، کشاورزی و جابجایی مواد برای مدیریت موثر بارهای سنگین با دقت، به گیره های هیدرولیک متکی هستند. سیستم هیدرولیک در این گیره ها نیروی بالایی را برای نگه داشتن ایمن اشیا در جای خود فراهم می کند.
توانایی آنها در عملکرد موثر تحت بارهای زیاد و در شرایط سخت محیطی آنها را برای کارهای چالش برانگیز صنعتی ارزشمند می کند.
گیره های هیدرولیک برای مقاومت در سخت ترین شرایط و ارائه عملکرد قابل اعتماد در کاربردهای سنگین ساخته شده اند.
پیشرفت های گیره ربات
همگرایی فناوری های پیشرفته
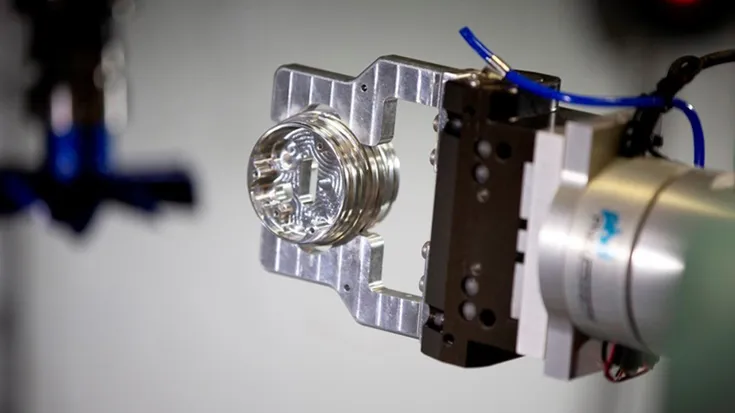
هسته اصلی این نوآوری همگرایی فناوری های پیشرفته نهفته است. به عنوان مثال، ادغام بینایی کامپیوتری قابلیتهای گیرههای رباتیک را تقویت کرده است، و آنها را قادر میسازد تا موارد نیمهشفاف و بازتابنده را شناسایی کنند و بر محدودیتهای بصری قبلی در جابجایی رباتیک غلبه کنند. هدف نهایی دستیابی به “چشم های رباتی” است که به روبات ها توانایی درک اشیاء شبیه به انسان را می دهد.
شبکه های عصبی
علاوه بر این، ادغام شبکههای عصبی با بینایی کامپیوتری منجر به سیستمهایی میشود که قادر به تقسیمبندی، طبقهبندی، و مشخص کردن نقاط درک بهینه روی اشیاء هستند. این امر به ویژه برای عملیات هایی مانند چیدن اقلام و پالت زدایی مفید است. همانطور که صنایع بی وقفه به دنبال کارایی هستند، سرعت عملیات به عنوان یک عامل کلیدی ظاهر می شود.
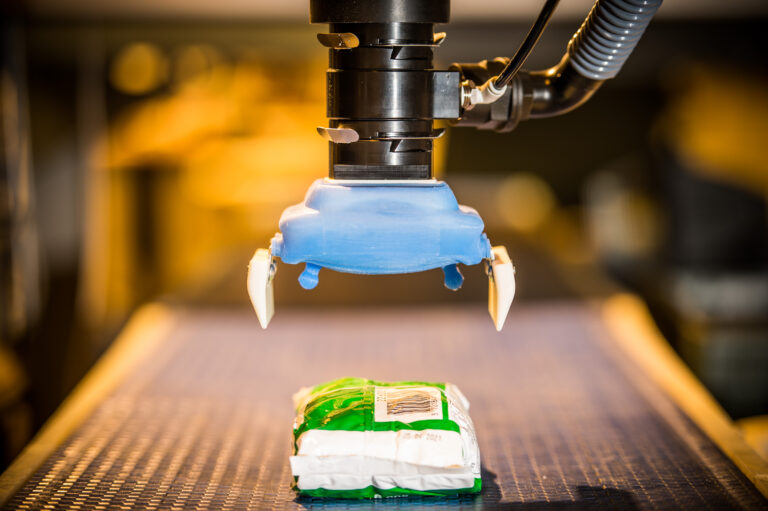
گیره هیبریدی: بهترین های هر دو جهان
گیره های هیبریدی عصر جدید به طرز هوشمندانه ای مزایای مکنده ها را با فناوری گیره ادغام می کنند. در حالی که مکنده ها در جداسازی اقلام عالی هستند، گیره حرکت پایدار را تضمین می کند. این روش ترکیبی، حرکات رباتیک سریعتر را تسهیل میکند، در برخی موارد، توان عملیاتی را از 300 تا 400 مورد قبلی در ساعت به 1200 مورد افزایش میدهد و مجموعه متنوعی از آیتمها را از نظر وزن، شکل و بافت مدیریت میکند.
جابجایی مواد
به طور سنتی، کار دستی بر جابجایی مواد غالب بود. اما با روباتهای نوآورانه، پردازش مواد میتواند با سرعتی چهار برابری در عملیات انسان اتفاق بیفتد. در یک چرخه پیوسته سه شیفتی، بهره وری یک ربات منفرد با 10 تا 12 نفر مطابقت دارد و نویدبخش بازگشت سرمایه است.