تعادل ربات انساننما
بررسی تکنیک های تعادل ایستا و پویا
در سالهای اخیر، شاهد پیشرفتهای چشمگیری در رباتیک انساننما بودهایم، با روباتهایی که میتوانند راه بروند، بدود و حتی بپرند. با وجود این دستاوردها، چابکی و تعادل روباتهای انساننما همچنان از انسانها عقب است و چالشهایی را برای ادغام ایمن آنها در محیطهای انسانی ایجاد میکند و مانع پذیرش گسترده روباتهای انساننما میشود. ما مطمئناً نمی خواهیم یک ربات در یک شیفت کاری روی انسان فرو بریزد.
این مقاله به بررسی استراتژیهایی میپردازد که مهندسان برای حفظ تعادل ربات انساننما با تمرکز بر تکنیکهای ایستا و پویا استفاده میکنند. درک این استراتژی ها برای پیشبرد پایداری رباتیک و افزایش عملکرد آنها در کاربردهای مختلف بسیار مهم است.
1 – تعادل استاتیک
تعادل ایستا به توانایی ربات برای حفظ ثبات در حالت ثابت یا زمانی که به اندازه کافی آهسته حرکت می کند که اثرات دینامیکی ناچیز است، اشاره دارد. این اغلب از طریق موقعیت یابی دقیق و کنترل مرکز ثقل ربات COG نسبت به پایه پشتیبانی آن مدیریت می شود.
ایجاد موقعیت های ایستا برای روبات های انسان نما دوپا به دلیل بی ثباتی ذاتی آنها در مقایسه با روبات های سه پایه چالش برانگیز است. رباتهای دوپا فاقد همان سطح تعادل و پشتیبانی هستند که حفظ یک وضعیت پایدار را دشوار میکند. دستیابی به این امر مستلزم سیستم های کنترلی پیشرفته و مکانیک دقیق است که آن را به یک کار پیچیده تر از روبات های سه پایه تبدیل می کند.
برای دستیابی به تعادل ایستا، درک و کنترل چندین مفهوم اساسی ضروری است:
مرکز جرم CoM :نقطه ای که جرم ربات در آن متمرکز شده است. برای تعادل پایدار، پیش بینی COM روی زمین باید در داخل BoS قرار گیرد.
پایگاه پشتیبانی BoS :ناحیه ای که توسط نقاط تماس ربات با زمین محصور شده است (مثلاً پا). یک BoS بزرگتر معمولاً پایداری بهتری را فراهم می کند.
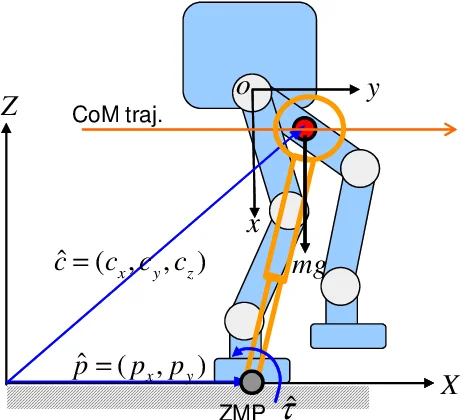
نقطه لحظه صفر ZMP :نقطه ای روی زمین که برآیند نیروهای واکنش زمین در آن عمل می کند. برای تعادل پایدار، ZMP باید در داخل BoS قرار گیرد.
کنترل وضعیت بدن: تنظیم موقعیت مفاصل و اندام ربات برای حفظ یا دستیابی به وضعیت مطلوبی که CoM را در BoS نگه می دارد.
مرکز جرم CoMدر مقابل مرکز ثقل CoG :در ربات های انسان نما، مرکز جرم CoMنقطه ای است که جرم ربات به طور مساوی توزیع می شود و به عنوان نقطه تعادل برای توزیع جرم آن عمل می کند و بدون توجه به اینکه جهت گیری ربات از سوی دیگر، مرکز ثقل CoGنقطهای است که وزن ربات تحت تأثیر گرانش به طور مساوی توزیع میشود. CoG میتواند با تغییر جهت ربات یا هنگام حرکت در میدانهای گرانشی مختلف جابهجا شود، زیرا نقطهای را نشان میدهد که نیروی گرانش به طور موثر بر روی ربات اثر میگذارد.
مرکز کنترل جرم Comm
هدف: مرکز جرم ربات را در پایه پشتیبانی آن نگه دارید.
روش: زوایای مفصل را برای جابجایی CoM تنظیم کنید. این می تواند شامل حرکات جزئی تنه، بازوها و پاها برای حفظ تعادل باشد.
توضیحات: کنترل CoM برای حفظ ثبات در ربات های انسان نما ضروری است. با تنظیم مداوم موقعیت CoM، روباتها میتوانند نیروهای خارجی را جبران کرده و وضعیت پایداری را حفظ کنند.
مزایای:
-با کاهش خطر واژگونی، که برای لوازم التحریر و حرکات آهسته ضروری است، ثبات را بهبود می بخشد.
– این روش همه کاره است، برای سناریوهای مختلف مانند ایستادن، راه رفتن آهسته و حرکات جزئی قابل استفاده است و به خوبی با سایر استراتژی های کنترلی ادغام می شود.
– کنترل وضعیتی پیشرفته یکی دیگر از مزایایی است که امکان قرارگیری دقیق بدن و حرکات نرمتر و طبیعی را فراهم میکند، که به ویژه برای کارهایی که نیاز به تنظیمات دقیق وضعیت بدنی دارند مفید است.
معایب:
– به قدرت پردازش قابل توجهی و الگوریتم های پیچیده برای کنترل بلادرنگ نیاز دارد که نیازهای محاسباتی را ایجاد می کند.
-علاوه بر این، تنظیمات پیوسته اتصالات می تواند انرژی بر باشد و به طراحی محرک کارآمد برای به حداقل رساندن مصرف برق نیاز دارد.
کنترل نقطه لحظه صفر ZMP
هدف: نقطه لحظه صفر را در چند ضلعی تکیه گاه پای ربات نگه دارید تا تعادل را در حین حرکات آهسته یا موقعیت های ثابت تضمین کنید.
توضیحات: ZMP Control یک روش محبوب است که برای اطمینان از پایداری ربات های انسان نما استفاده می شود. این شامل محاسبه نقطه لحظه صفر است، نقطه ای روی زمین که مجموع کل نیروهای عمودی و تکانه ها صفر است. با اطمینان از باقی ماندن ZMP در چند ضلعی پشتیبانی (منطقه ای که پای ربات پوشیده شده است)، ربات می تواند تعادل را حفظ کند. به عنوان مثال، حرکت بازوها یا کج کردن تنه می تواند به تغییر COM و در نتیجه ZMP به موقعیت پایدارتر کمک کند.
مزایای:
– با ارائه یک معیار واضح برای تعادل، که طراحی حرکات پایدار را تسهیل می کند، قابلیت پیش بینی را ارائه می دهد.
– قابلیت اطمینان را از طریق نظارت مداوم و تنظیمات ZMP برای حفظ تعادل ثابت تضمین می کند.
معایب:
استراتژی کنترل ZMP با نیازهای محاسباتی مواجه است که به منابع قابل توجهی برای تنظیمات بلادرنگ نیاز دارد.
– به اختلالات حساس است، با اختلالات ناگهانی یا زمین ناهموار مبارزه می کند.
-علاوه بر این، محدودیت های دینامیکی دارد و برای فعالیت های بسیار پویا مانند دویدن یا پریدن کمتر موثر است.
2- تعادل پویا
تعادل پویا شامل حفظ ثبات در هنگام حرکت ربات مانند راه رفتن، دویدن یا انجام کارهای پیچیده است. این امر مستلزم استراتژی های کنترلی پیچیده تری برای انطباق با شرایط به سرعت در حال تغییر است.
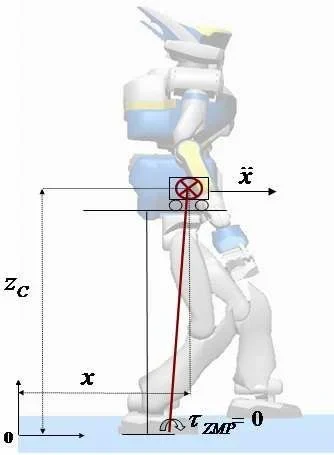
مدل های آونگ معکوس
هدف: ساده سازی دینامیک ربات برای شبیه سازی یک آونگ معکوس، تسهیل طراحی الگوریتم های اصلی کنترل تعادل برای پایداری عمودی.
توضیحات: مدل آونگ معکوس دینامیک ربات را ساده می کند تا شبیه یک آونگ معکوس شود، جایی که بدن ربات روی یک نقطه محوری متعادل است و معمولاً پاهای آن را نشان می دهد. ایده اصلی این است که مرکز جرم ربات COMرا کنترل کنید تا تعادل را حفظ کنید، دقیقاً مانند تعادل یک چوب روی دست. این روش برای طراحی الگوریتمهای کنترل تعادل اساسی حیاتی است و پایهای برای تکنیکهای متعادلسازی پیچیدهتر فراهم میکند.
مزایای:
– پایه محکمی برای طراحی الگوریتمهای کنترل تعادل اساسی فراهم میکند، که برای حفظ ثبات قائم ضروری است.
– به علاوه، درک و کنترل تعادل ربات را با کاهش پیچیدگی حالت پویا آسان تر می کند.
معایب:
یک دینامیک ساده شده را فرض می کند، که ممکن است پیچیدگی های حرکات سریع یا نامنظم را در بر نگیرد. در نتیجه، پایه محکمی برای تعادل اساسی فراهم می کند. مدلهای پیچیدهتر و استراتژیهای کنترلی برای فعالیتهای پویا مانند راه رفتن، دویدن یا پریدن مورد نیاز است.
کنترل پیش نمایش COM
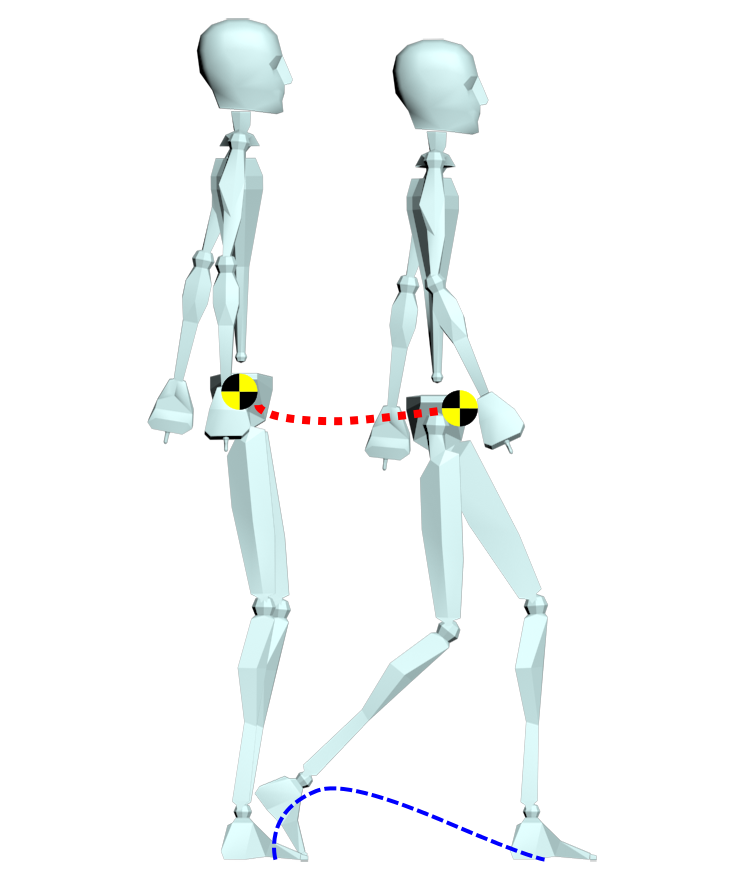
هدف: موقعیتهای آتی مرکز جرم ربات را پیشبینی کنید و حرکات را مطابق با آن برنامهریزی کنید تا در فعالیتهای پویا مانند راه رفتن پایداری خود را حفظ کنید.
توضیحات: کنترل پیشنمایش COM بر پیشبینی موقعیتهای آینده مرکز جرم ربات و برنامهریزی حرکات بر این اساس متکی است. این شامل ایجاد مسیری است که پایداری را تضمین می کند و محرک ها را کنترل می کند تا این مسیر را از نزدیک دنبال کنند. سیستم کنترل مسیر مورد نظر COM را در یک پنجره زمانی کوتاه در آینده محاسبه میکند و ربات را قادر میسازد تا به جای واکنش صرف به اختلالات، از قبل تنظیم شود. این روش در حصول اطمینان از حرکت صاف و پایدار به ویژه در هنگام راه رفتن موثر است.
مزیت: این روش با پیشبینی تغییرات و تعادل در طول فعالیتهای پویا، پایداری بهتری را ارائه میدهد. حرکات نرم تر و طبیعی تر را تضمین می کند و به ویژه در هنگام پیاده روی موثر است.
معایب: این روش به محاسبات بلادرنگ پیچیده نیاز دارد و به شدت بر مدل های پیش بینی دقیق متکی است. با تغییرات محیطی ناگهانی و غیرمنتظره دست و پنجه نرم می کند و سازگاری را به یک چالش تبدیل می کند.
>> توجه: کنترل پیشنمایش کنترل COM VS Center of Mass (CoM):
اگرچه نامهای مشابهی دارند، کنترل پیشنمایش COM و کنترل مرکز جرم Commاستراتژیهای متمایز هستند.
کنترل پیشنمایش COM یک استراتژی پویا برای فعالیتهایی مانند راه رفتن و دویدن است که از الگوریتمهای پیشبینی برای پیشبینی و تنظیم موقعیتهای آینده مرکز جرم Commاستفاده میکند. این حرکت صاف را تضمین می کند اما به منابع محاسباتی قابل توجهی نیاز دارد.
کنترل مرکز جرم Commیک استراتژی ایستا برای حفظ ثبات در حالت ثابت یا حرکت آهسته است. این به طور مداوم زوایای مفصل را تنظیم می کند تا CoM را در پایه پشتیبانی نگه دارد و پاسخ های فوری به اختلالات را ارائه می دهد اما همچنین نیاز به توان محاسباتی دارد.
به طور خلاصه، کنترل پیش نمایش COM برای کارهای پویا ایده آل است، در حالی که کنترل CoM برای موقعیت های ایستا و آهسته بهترین است. این استراتژیها با هم، ثبات و عملکرد روباتهای انساننما را در وظایف و محیطهای مختلف افزایش میدهند.
کنترل کل بدن
هدف: هماهنگ کردن تمام قسمتهای بدن ربات برای رسیدن به تعادل، بهینهسازی تلاشهای کنترلی در تمام مفاصل و اندامها برای انجام وظایف و حرکات پیچیده.
توضیحات: کنترل کل بدن تمام قسمت های بدن ربات را در نظر می گیرد و حرکت را برای رسیدن به تعادل هماهنگ می کند. این روش از کل زنجیره سینماتیکی و خواص دینامیکی ربات استفاده میکند و توزیع تلاش کنترلی را در تمام مفاصل و اندامها برای پایداری در موقعیتها و حرکات مختلف بهینه میکند. برخلاف روشهای سادهتر که بر روی بخشهای خاص تمرکز میکنند، کنترل کل بدن همه مفاصل و محرکهای ربات را برای دستیابی به یک وضعیت متعادل و یکپارچه هماهنگ میکند. این رویکرد جامع به ربات اجازه می دهد تا وظایف پیچیده را با حفظ ثبات انجام دهد.